Subsea / ROV Simulation
The ARI ROV Simulator is certified by DNV-GL to the highest Class A Standard, and meets the requirements for Class A simulator according to IMCA guidelines pertaining to ROV simulator classes, their performance and viability for training.
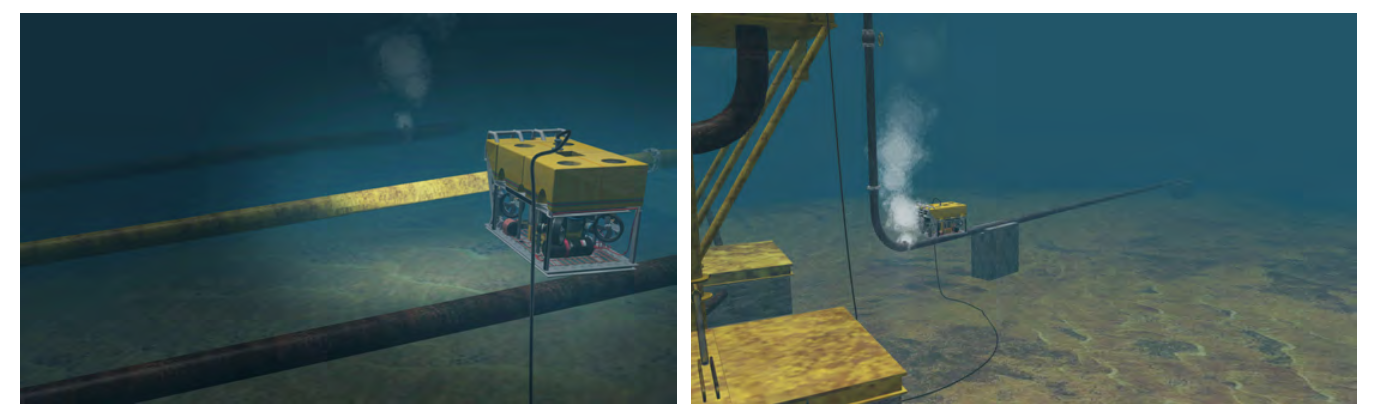
The simulator can be used by ROV manufacturers, operators, oil companies and others for tasks such as field visualization (as built), mission planning, dive plan development / evaluation, as well as subsea equipment design and testing for ROV missions prior to field deployment. As a training tool, the simulator is a vital aid for equipment specific, mission specific or site specific ROV pilot training.

The simulator provides an opportunity for pilots and potential pilots, to gain ample ‘stick time’, without risking ROV systems, tying up expensive field equipment, or causing wear and tear to equipment that could otherwise be employed on jobs offshore.
The simulator is deployed on networked PCs, with distributed processing of simulated camera graphics, sonar data, controls interface, and the hydrodynamic modeling software component. The simulator supports multiple dynamic objects (including two ROV systems), large umbilical lengths (deep water operations) and fully interactive manipulators.

The simulator’s dynamic modeling feature incorporates data from simulated ROV equipment and environment and uses physics-based calculations to produce realistic responses to pilot commands. The ROV Operations Simulator system can be used to simulate the operational duties of an ROV in support of inspection, survey, drilling, installation, commissioning, and other sub-sea intervention activities.
.Hydrodynamic Modeling
The hydrodynamic model used in the ARI ROV Operations Simulator is the key to the high degree of behavioral realism. The model provides results that are accurate, consistent and predictable under a multitude of combinations of forces, conditions, objects, situations, and user actions.
The hydrodynamic model fully accounts for all parameters that have any impact on ROV behavior and position, including sea state, current pattern (in vertical and horizontal zones), tether drag (500 m+ of tether can be deployed), vehicle drag, buoyancy (variable with model), hydrodynamic drag of umbilical / TMS combination, thruster inputs (various thrusters operate in combination to provide the requisite position, heading and depth change) and collision impact including tether entanglement.
Imaging Sonar
The ROV Simulator is equipped with a 2D, multibeam, imaging sonar offering a 120° field of view with update rates of up to 30 Hz giving rapid feedback to the user. The 120° cone in the middle of the display shows the image that the sonar is producing. Around this display are the most commonly used controls.
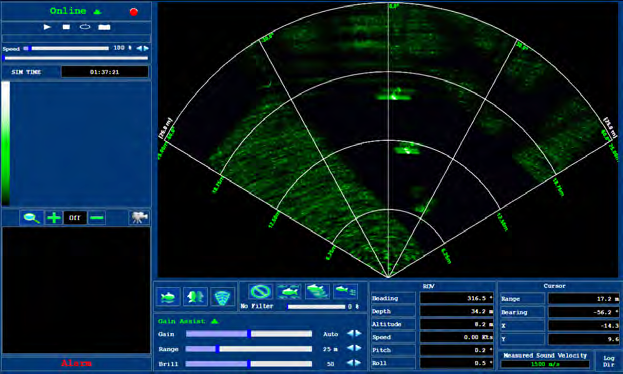
The Sonar is provided with controls for starting the sonar imaging, starting the software logging of the images received from the sonar, replaying previously logged data, capturing images, selecting the post processing filtering to be applied to the image, selecting the colour palette, adjusting range and gain controls, displays of relevant ROV data and several others.
Camera Module
Camera modules generate the underwater imagery to simulate the video cameras mounted on an ROV and/or TMS. Each camera view can be altered by the user using pan/tilt and focus controls provided, to get the best possible view under the prevailing conditions of field of view, brightness and distortion.
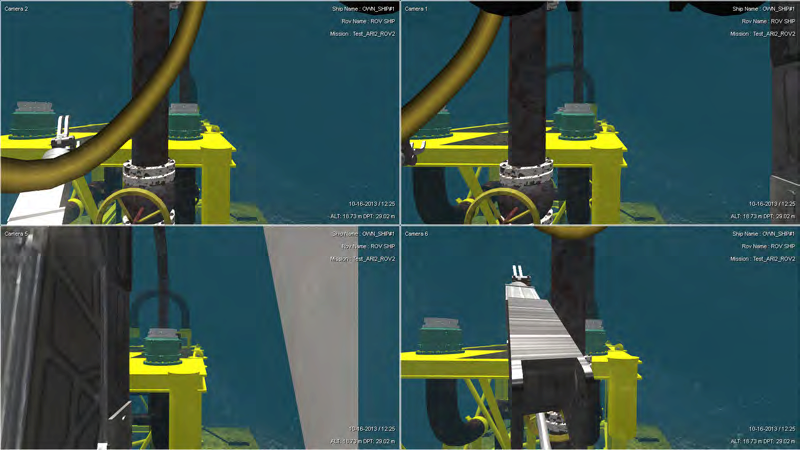
The user has continuous access to a split screen arrangement (quad view) to observe up to four camera views simultaneously. Any camera view can be individually selected for full screen presentation.
Camera images will appear hazy to simulate the effect of mud kick-up (as a result of hitting the seabed or engaging thrusters while too close to the bottom). Several dimmable lights are provided to illuminate the subsea areas – lights can be used in combination asrequired to get the best possible camera view.
Other Product
-

OFFSHORE SIMULATORARI Simulation
-

BRIDGE SIMULATORARI Simulation
-
ENGINE SIMULATORARI Simulation
-

DRILLING & Well SIMULATORARI Simulation
-

SUBSEA / ROV SIMULATORARI Simulation
-

MINING SIMULATORARI Simulation
-
Cargo Handling SimulatorARI Simulation
-

Crane SIMULATORARI Simulation
-

Naval SimulatorARI Simulation